
RTK( Real-time kinematic)指的是实时动态测量,也叫载波相位差分定位,是 GNSS 相对定位技术的一种,载波相位差分技术能实时提供观测点的三维坐标,并达到厘米级的高精度。与伪距差分原理相同,由基准站通过数据链及时将其载波观测值及基准站坐标信息一同传送给用户站。用户站接收GPS卫星的载波相位与来自基准站的载波相位,并组成相位差分观测值进行及时处理,能及时给出厘米级的定位结果。
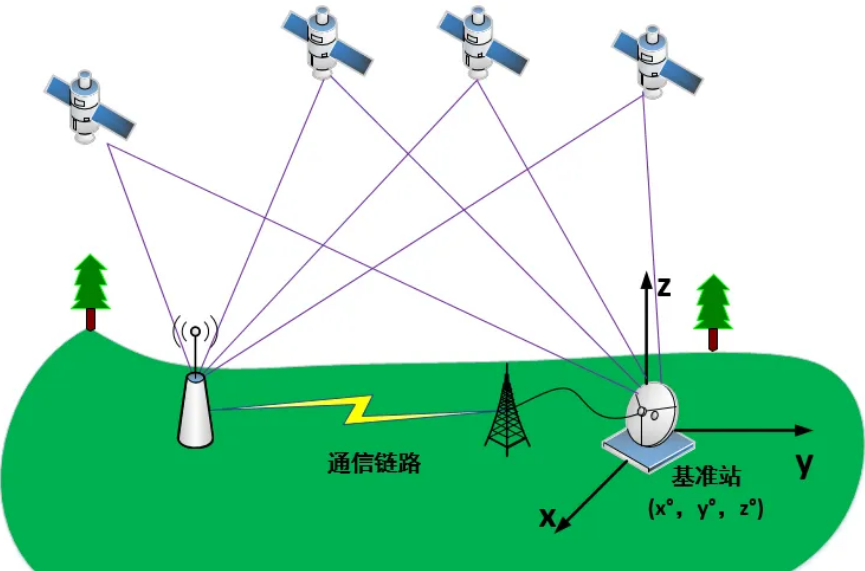
RTK差分定位系统主要通过基准站和流动站(接收机位置)之间的实时数据链路和载波相对定位快速解算技术,实现高精度动态相对定位。具体实现方法就是,在地面设置固定的基准站(要保证位置精准标定),用来接收卫星信号,通过两种方式为用户提供差分服务,一种是用已知的基准站位置解算所收到信号中的误差,误差通过网络播发的形式传输给附近的用户接收机,由于参考站和接收机端的误差存在时间和空间上的相关性,在接收机端减掉误差后,得到的就是一个高精度位置信息。另一种方法是将基准站接收机收到的观测量直接发送给用户,用户端通过“求差”的方式消除或减少误差的影响。这就是高精度 GNSS 定位技术的基本原理。第二种方法的效果较好,所以被广泛采用。
由于载波相位观测值的波长仅为对应伪距观测值的1/100,其测量精度相对较高,所以在精密定位时通常使用载波相位方法。但由于卫星信号结构的限制,在相位观测量中总是包含着一个初始相位整周数,因此,卫星信号整周模糊度的解算成了采用载波相位进行精密相对定位的关键问题。准确、快速的解算出整周模糊度,不仅能够缩短定位时间,还能够保障相对定位的精度。其主要思路可分为3个步骤:(1)标准最小二乘平差求基线和整周模糊度浮点解;(2)整数最小二乘估计求整周模糊度固定解;(3)基线固定解。
在差分定位过程中,存在着三部分误差:
第一部分是对每一个用户接收机所公有的,例如,卫星钟误差、星历误差、电离层误差、对流层误差等;
第二部分为不能由用户测量或由校正模型来计算的传播延迟误差;
第三部分为各用户接收机所固有的误差,例如内部噪声、通道延迟、多径效应等。
RTK差分定位系统的优点:
(1)消除卫星钟钟差
(2)消除卫星星历误差
(3)消除电离层延迟
(4)消除对流层延迟
(5)将接收机钟钟差做为未知数求出以上措施将有效地提高定位精度,一般而言,以坐标方式差分可达±5m的精度,以伪距方式可达±(1~3)m级精度,以载波相位方式可达±(1~3)cm的精度,高程精度为平面精度的2~3倍。
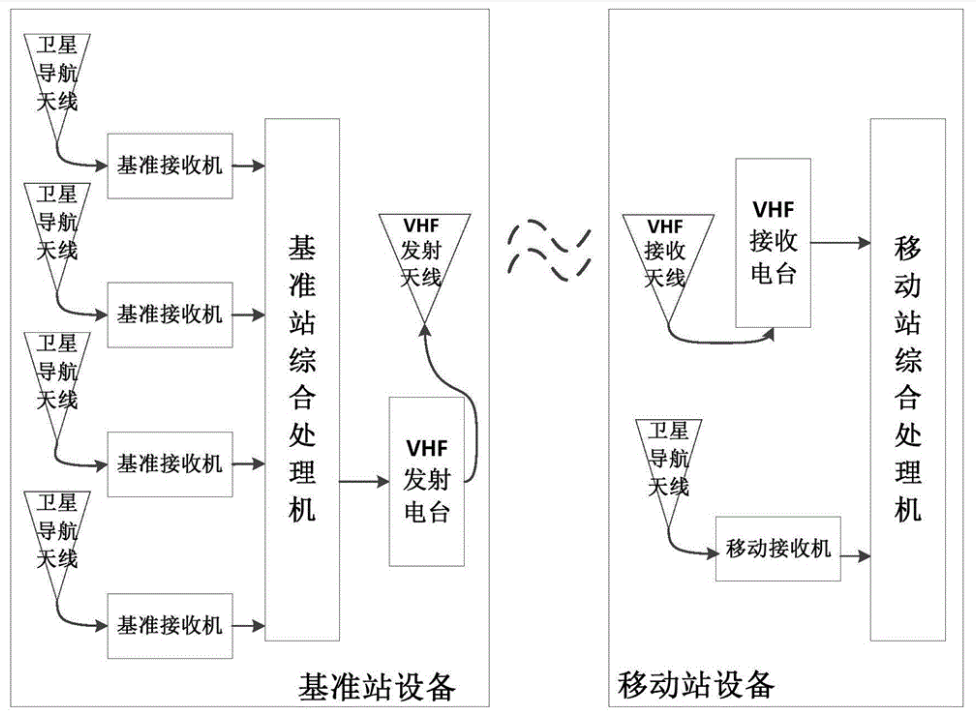
(1)卫星信号接收系统:必须有2台以上的定位接收机设在基准站和流动站上,如果基准站在同一个时间为多用户服务的时候,需要选择双频接收机,从而确保其采样率与流动站采样率达到一样。
(2)数据传输系统:数据传输系统主要是通过基准站的数据发射装置与流动站数据接收装置相结合而成,其是RTK技术中的重要设备。
(3)软件解算系统:软件解算系统能够有效地确保RTK系统测量结果的正确性。如以载波相位为观测量的实时动态测量,其主要工作就是将载波相位初始整周未知数的精密确定、流动观测中对卫星的连续跟踪和失锁后的重新初始化等。
利用差分定位技术,第一部分误差完全可以消除,第二部分误差大部分可以消除,其主要取决于基准接收机和用户接收机的距离,第三部分误差则无法消除。
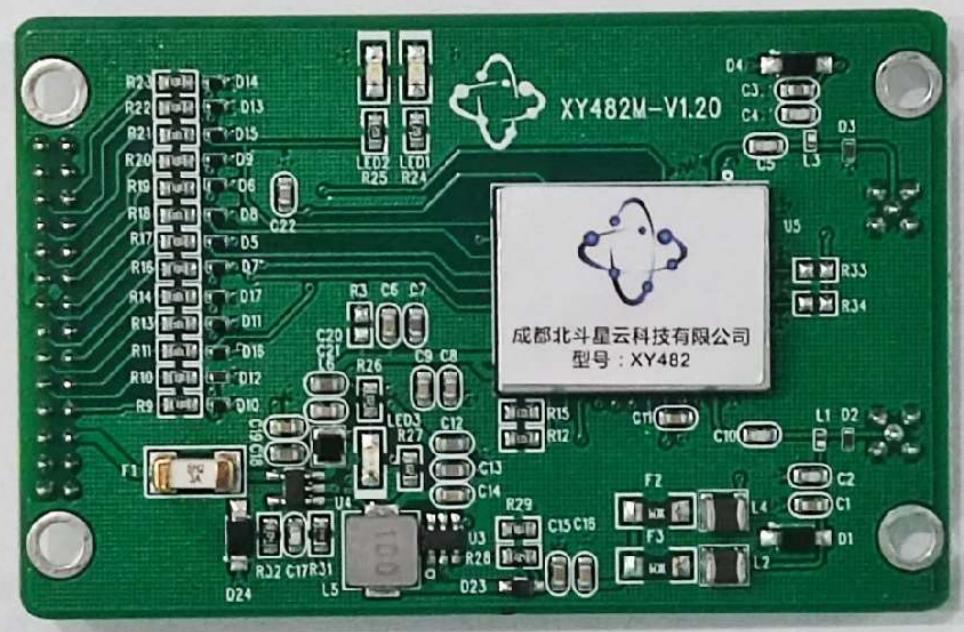
产品特点:
全系统、全频点卫星跟踪
同类最佳的 GNSS 观测值和 RTK 定位精度 (厘米级)
最佳 SwaP (尺寸、重量和功率)
AIM+ 先进的抗干扰、防欺骗技术
业界领先的 100 Hz更新率,<10ms 超低延时
从初始化起即可使用的 GNSS 航向角 ,消除了对车辆动态的要求及地磁传感器的依赖
易于集成的 GNSS流动站接收机
相关产品:




长按屏幕识别二维码
打开手机扫描二维码

